

追势科技拥有业内领先的快速建图和定位技术。

什么样的停车场才“配得上”自动驾驶?
无论是人类司机还是自动驾驶,停车场是每一次出行的起点,也是每一次出行的终点。解决停车问题,是公认的自动驾驶需要征服的关键场景。那么,究竟什么样的停车场才能“配得上”自动驾驶?
“现实中的停车场千差万别,生态车位、超窄车位、立体车库、老旧停车场等,通过改造全国停车场来实现自动驾驶几乎不可能,唯一的路径就是提升单车智能化。”追势科技CEO马光林博士说:“单车智能要真正的发挥作用,必须覆盖80%的生活场景才可以。当打开导航地图,在里面能搜索到的停车场,都应该“配得上”自动驾驶车辆。”

低速自动驾驶什么时候得到普及?
那么,能够覆盖80%停车场景的自动驾驶车什么时候能够得到普及?
进而,引出一连串如下的思考:
灵魂拷问1:2020年各大主流车厂争相规划的低速自动驾驶(AVP)技术,究竟能够适配几个停车场?
灵魂拷问2: 在硬件先行,软件跟上的大趋势下,“硬件武装到牙齿”的自动驾驶车辆,软件要到哪一年才能支持80%以上的停车场?
灵魂拷问3:什么价位的车配得上自动驾驶?
针对以上问题,追势科技给出了自己的答案:
追势科技的目标是2023年能让所有配备L2级以上辅助驾驶功能的车辆,都能在全国80%的停车场能实现低速自动驾驶功能。

追势科技目标:到2023年80%停车场实现低速自动驾驶

低速自动驾驶的普及,最大瓶颈是什么?
埃隆马斯克在2019年的股东大会上讲:对于自动驾驶而言,当你在停车场巡航时,停车场就像一个迷宫,而且有很多障碍物,人在动,车也在动,这已经很棘手了,所以,它已经接近魔法了。“如何获取这一迷宫般的停车场的地图,以及如何快速定位车辆的位置来做停车场内巡航,是阻碍低速自动驾驶快速全面普及的最大障碍。”追势科技CTO蒋如意博士说:“实现低速自动驾驶全面普及的最大瓶颈是停车场地图及实时定位算法,而我们有业内领先的快速建图和定位技术。”
回顾自动驾驶的研发历史,特别是低速自动驾驶的研发历史,过去大家更多关注的是对障碍物、行人、车辆的感知,而忽略了停车场地图及快速定位技术。
为大面积普及低速自动驾驶,当务之急是停车场地图及快速定位算法
要实现低速自动驾驶的快速建图和精准定位,目前有两大瓶颈:第一,传统的高精制图耗时耗力,高精制图是测绘车辆通过记录路上所有的目标来完成制图的,这种方法不具规模效应,制图本身也就成为了瓶颈;第二,虽然从视觉定位可用的方案上来讲,语义和点云是其中众所周知的两大技术方向,而语义定位在停车场这种存在大量重复语义的环境中,存在初始定位较难快速准确的初始化,基于点云信息的定位,又存在受定位鲁棒性差,精度容易受干扰的问题。
追势科技使用L2级可量产的摄像头和超声波,结合其团队十多年专注在低速自动驾驶开发的丰富的量产经验,创新的开发出基于语义和SLAM融合算法,突破了这2大瓶颈。据悉,追势科技的快速建图技术已经达到建立1万平方的停车场只需1小时;在自动驾驶过程中实现10s中内的精准定位和最大20cm的定位误差。同时,还创新的突破了停车场地图在不同车辆之间的地图复用,即A车采集的地图,通过传感器标定参数之间的转换,即可直接给B车来做定位和导航使用。
这几项技术,极大的突破了AVP采集和建图的效率和AVP功能的实现,多车复用也对于AVP技术的普及和推广起到关键作用。

追势科技实时建图定位特点

魔鬼停车场适配的案例分享
蒋如意博士表示,追势科技的低速自动驾驶方案在软件上成熟度和稳定性非常高,目前已经在地平线J3、TI TDA4X,Nvidia TX2等多家计算平台上完成移植和验证。可以根据客户不同的硬件选型,直接进行大规模量产。
“通过征服全国各地最优挑战性的一个个停车场,我们的方案在不断的迭代优化,成为行业领先。”追势科技蒋如意博士说。
一方面为了大量采集停车场数据,另一方面进一步优化产品细节,追势科技从2020年开始进行大规模的数据采集和适配。蒋博士也分享了近期追势科技在几个魔鬼停车场适配的案例。
深圳某车厂停车场:露天圆盘式停车场
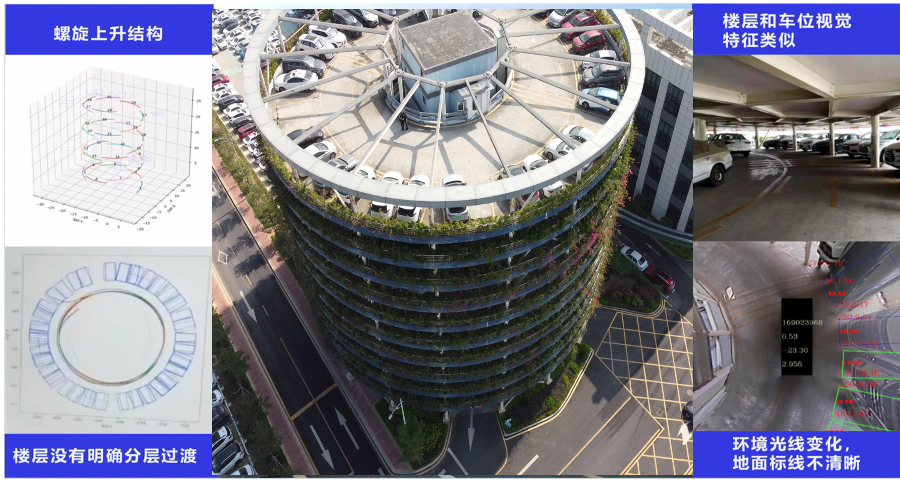
深圳某车厂的露天圆盘停车场
2020年11月,追势科技在深圳适配了某车厂厂区内的露天圆盘停车场。这个停车场是一个露天盘旋向上的结构,楼层之间没有明显的过度,各个车位的视觉特征几乎一致。这种场景对于视觉SLAM是极具挑战。追势科技用半天顺利完成地图的建立和场景适配,完成了任意起点到指定即任意车位的自主泊车,在露天圆盘式停车场环境下跨层的定位巡航、智能绕行、避让车辆行人等功能。


