
重负载大型零件的搬运和分拣一直是重工业的难题,过去长期依赖人工“龙门吊”完成,不仅劳动强度大,效率也很低,智能化升级改造迫在眉睫。
在某工程机械行业巨头的智慧工厂内,视比特机器人携手中车数字交付了行业内首个大件立库桁架搬运分拣项目,以先进的“AI+3D视觉”技术突破了重型工件精准定位、海量工件准确识别等多项技术难题,实现了复杂工况下超大负载零件的全自动齐套搬运与拣选。项目完成后数吨级大型零件的搬运分拣效率提升至120s/件。


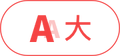
产线由双层桁架分拣平台、机械手抓取系统、3D视觉识别系统三大核心模块组成,先后衔接了出库、搬运、零件抛丸、分拣、转运等工艺工序,承担着将重负载大型零件从自动化立体仓库搬运至输送线、准确分拣齐套大型零件并转运至焊接工位的整个流程中的搬运与分拣任务。
双层桁架分拣平台

在现场严苛的空间条件限制下,创新性的采用双层设计的整体布局。面对超长、重型零件的识别搬运,设计了长达43米、跨距10米、重复定位精度达到1mm以内的重型搬运桁架,并自主研发了重负载多级伸缩桁架系统,在桁架的多级伸缩协同运动中,有效解决了现场空间受限问题,同时覆盖高度大、跨距大的搬运要求,保证了分拣效率。
机械抓手系统
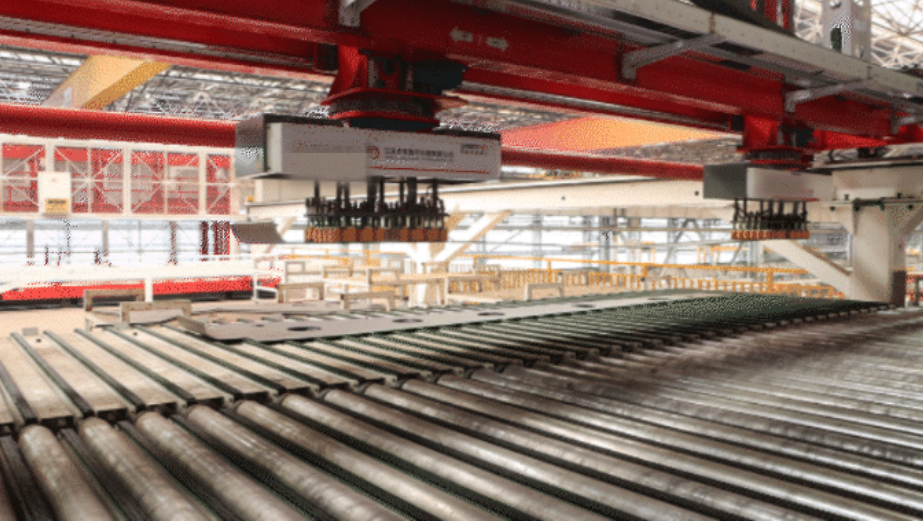
在双层桁架上,安装10套可水平旋转、柔性可控的机械手端拾器/机械抓手,实现对不同尺寸和结构的零件的高柔性、精准抓取。针对9米以上的重型钢板零件,采用双臂协同抓取方式,实现大型零件的准确抓取和放置。
3D视觉识别系统
此部分由3D相机、视觉工控机、软件、光源等部分组成。
视比特AI机器视觉处理软件通过调用具有自适应功能的3D相机对钢板零件进行快速扫描、多点拍照,并通过图像拼接、精准区分等技术对图像进行适当的处理,实现超大视野下海量规格零件的高精度识别与分拣。
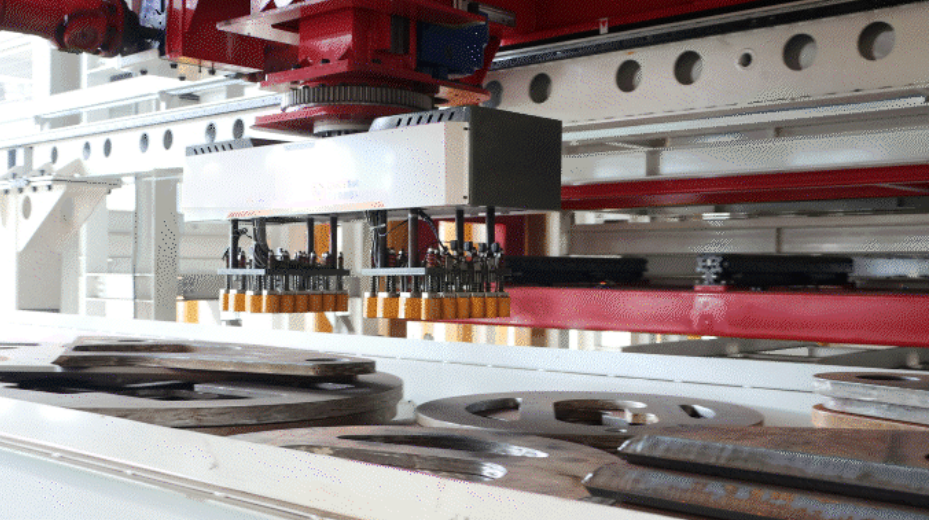
此外,通过自研智能规划调度软件和端拾器智能控制软件,实现狭小空间内多桁架高速无碰运动的协调控制以及机械手对大型零件的重负载抓取与搬运。

基于智能桁架控制与双臂协同
运动的超大负载搬运
本项目采用视比特自主研发的智能桁架软硬件系统。大跨度、多级伸缩的智能桁架,搭配双臂协同运动的机械手,可承载1.2T重量,满足高精度大负载大跨距搬运需求。在多桁架多机械手协同运动过程中,通过智能桁架机器人控制器和智能规划调度软件,实时对臂与臂、臂与环境、被抓取物体与环境等进行在线检查,并对零件搬运与分拣全场景进行无碰运动规划与时序协调控制,实现桁架机器人相邻臂在同时运动时不发生干涉,进而保障生产线的稳定高效运行。
超大视野下的零件
精准识别与分拣

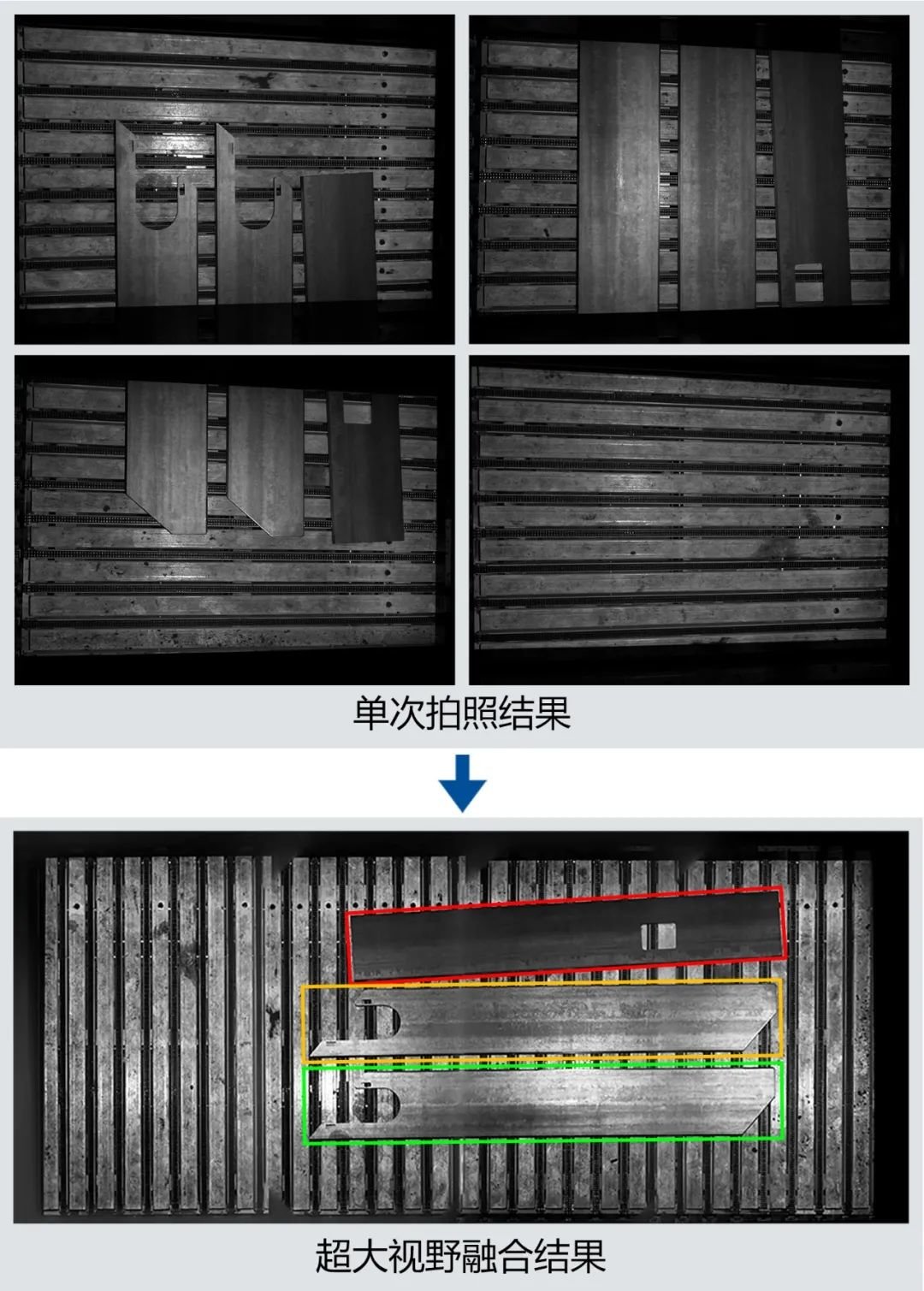
本项目运用自主研发的基于点云匹配+深度学习的3D视觉图像处理技术,可自适应尺寸变化、有效解决自然光干扰,实现相似件的精准识别。同时融合多源协同高精度图像拼接、多尺度图像目标检测和方向自适应任意目标识别等核心技术,能够有效应对复杂背景下不同尺寸工件的识别分拣,视野覆盖可达12米,实现对超大视野下海量规格零件的精准识别与定位。

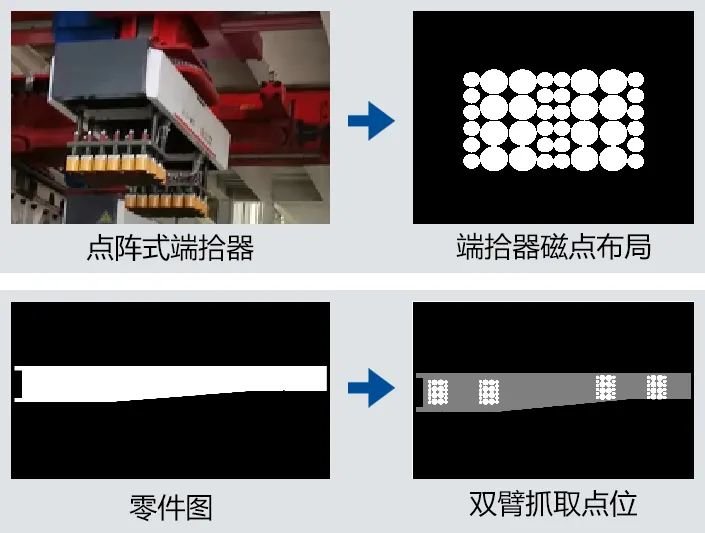
为保证适应不同类型工件的稳定抓取,本项目采用了自主设计的点阵式柔性端拾器,具有结构简单、普适性高、单点可控、性能稳定、即插即用等优势,能够实现海量工件的灵活抓取。同时基于视觉的智能化控制,能够保证端拾器精准吸附异形工件,避免与工件周边废料的粘合。