
一个没有头部的机械身体,正在以接近人类极限的速度飞奔。
2026年4月11日下午,宇树科技正式宣布:旗下H1人形机器人在百米测试中再次刷新世界纪录,实测峰值速度达到了10米/秒。
这个数字意味着什么?作为参照,牙买加短跑传奇博尔特保持的人类百米世界纪录是9.58秒,他冲刺时的峰值速度约为10.44米/秒。宇树H1已经逼近这个人类体能的极限边界。

这不是模拟数据,不是实验室样本,而是一台170公分、47公斤的人形机器人在真实测试中跑出来的成绩。
要理解这个突破的含义,需要知道它的起点。
仅仅在2025年8月,宇树H1创下的速度纪录还是3.3米/秒——大约是普通人慢跑的速度。那时候,这个数字已经是人形机器人领域的世界纪录了。

不到一年,从3.3到10,速度翻了三倍。
这种加速度并非偶然。2026年初,宇树科技创始人王兴兴在亚布力论坛上就放出了一个大胆预测:2026年年中,人形机器人的百米冲刺速度有望突破10秒,超越博尔特。
按照当前的进化节奏,这个目标已经变得相当可信。
H1能跑出10m/s,不是单一技术的胜利,而是硬件与算法协同进化的结果。

在硬件层面,宇树H1的腿部机构经过专门针对高速奔跑场景的重新设计。腿长合计约0.8米,关节驱动器的峰值扭矩和响应速度都有大幅提升,专门为"爆发式动作"进行了优化——这和人类短跑运动员专注于爆发力训练的逻辑是一致的。
在算法层面,宇树采用了最新一代的强化学习运动控制框架。简单来说,机器人通过大量仿真训练,自己"摸索"出了高速奔跑时的最优步态和重心控制策略,而不是靠工程师手动编写控制规则。这种数据驱动的方式,让机器人的运动能力具备了自我迭代的可能性。

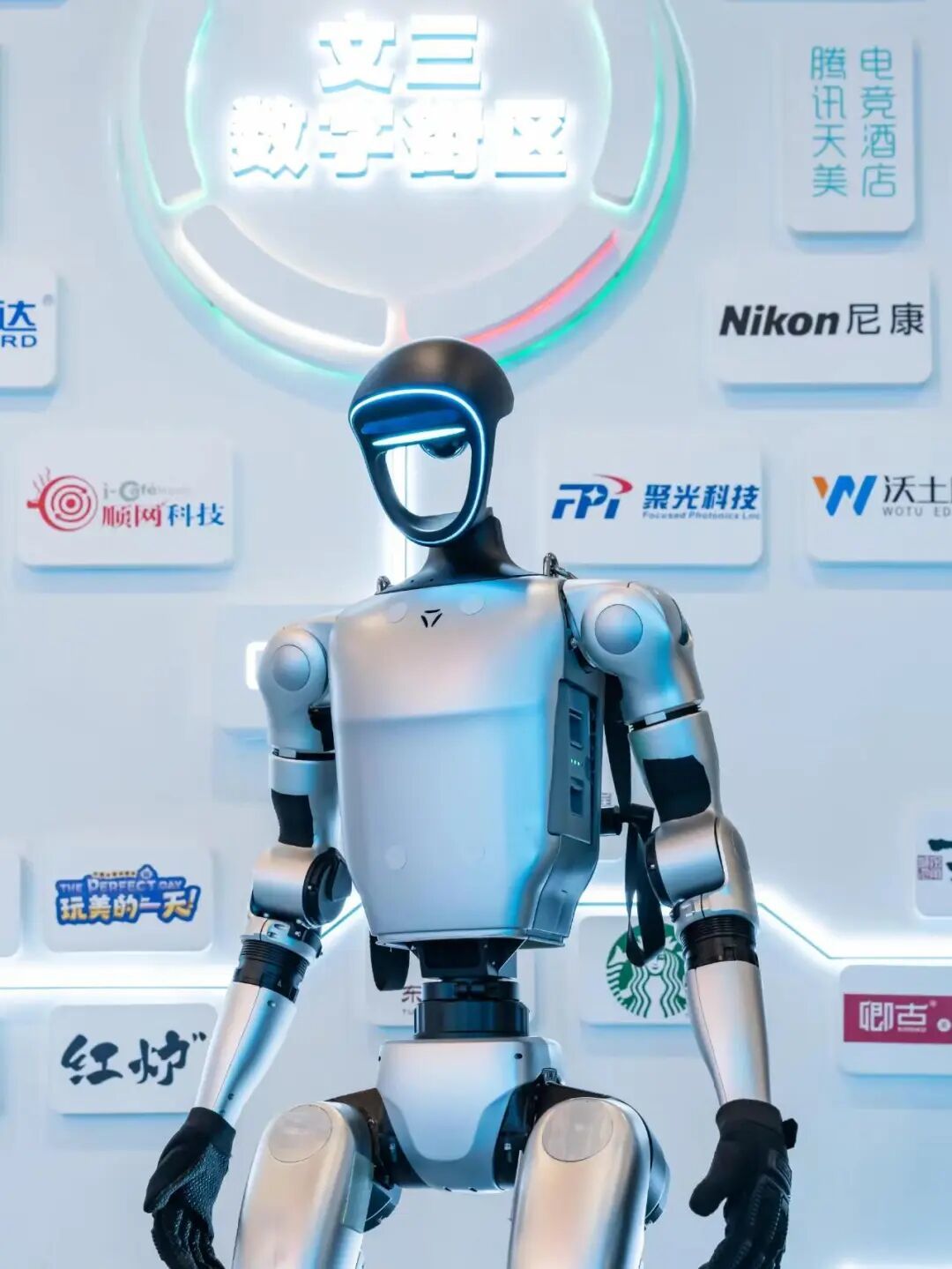
值得一提的是,测试视频中的H1机器人没有安装头部和躯干外壳,裸露的机械结构在奔跑时引发了不少网友的讨论。有人觉得"没头跑起来有点吓人",也有人直接联想到了科幻电影里的机器人形象。

宇树并非孤军奋战。就在不久之前,浙江大学杭州国际科创中心也发布了全尺寸人形机器人Bolt,同样宣称峰值速度达到10m/s。
这意味着,在人形机器人速度这个方向上,中国的两支团队——一家是商业公司,一家是高校研究机构——几乎同时触及了同一个技术节点。这种"同频突破"本身就很说明问题:不是某一家的偶然领先,而是整个领域的系统性爆发。

从全球来看,波士顿动力的Atlas机器人在运动控制方面同样有深厚积累,但在高速奔跑的公开数据上,宇树和浙大Bolt的成绩目前依然是该领域的领先水平。
速度纪录本身是一个技术里程碑,但更重要的问题是:跑这么快,有什么用?

答案其实很直接。高速运动能力意味着人形机器人开始具备真正的现场响应能力——在工厂物流中快速穿梭、在紧急救援场景中争分夺秒、在复杂地形中追赶或逃离。
目前,宇树H1的量产价格已经降到了约9万元人民币,是全球同类产品中性价比最高的选项之一。按照宇树的产品规划,H1将主要面向科研、工业检测和特种作业等专业市场。
王兴兴也曾多次强调,宇树的核心战略是"先把机器人做得足够能干、足够便宜,规模化再说其他的"。这个逻辑和早期特斯拉的电动车战略有几分相似——用技术优势先站稳市场,再靠规模效应把成本打下来。
从10m/s到百米跑进10秒,中间还有多远?
如果峰值速度能稳定维持在10m/s以上,百米成绩将落在10秒左右。但现实是,机器人的百米成绩不仅取决于峰值速度,还取决于启动加速、步频稳定性和全程体能管理——这些都是目前人形机器人需要进一步优化的方向。

但对照宇树H1不到一年内的速度演进曲线,2026年年中突破博尔特纪录已经不再是痴人说梦,而是一个有数据支撑的技术路线图。
一个不需要休息、不会疲劳、可以批量复制的"机械博尔特"正在被制造出来。

这个世界,正在加速变得陌生。